/*-----------------------------*/
[project] 用于大负载转台驱动的伺服控制系统开发
📅 2024-08-30
🔄 2024-08-30
⌚ Reading time: 1 min
📂
0.简介
学校项目,用于大负载转台驱动的伺服控制系统开发。要求能实现高精度的转角控制以及对制定目标的跟踪控制。
使用电机为 PMSM,功率 40 kW,$ U_{IN} = 396 $ ,$ I_{o(eff)} = 73 A $,极对数 4。

实验室有一套祖传的电机控制板和代码,使用了 DSP + CPLD 的方案。芯片型号
- DSP :TMS320F28335
- CPLD :AG256SL100
此外还有一个配套的 LabView 的上位机,用来调整控制参数。也即核心控制算法上面,没有什么我需要去实现的,拿来先用。我只需要实现功率部分,然后调试硬件,最后调试控制参数。
这个项目对我来说算是个硬件设计项目。
1.PMSM 控制原理与方法
TMS320F28335 这个芯片常用来做电机控制,我看的一些拆车视频中,比亚迪秦、特斯拉 model 3 的电机驱动器用的就是这个型号的芯片。ST 也有专门用来做电机控制的芯片,有些一体化电机用的是 STM32 的芯片,还有好多开源的电机控制学习板也是这款芯片。
这里简略的介绍下 PMSM 的 FOC 控制算法
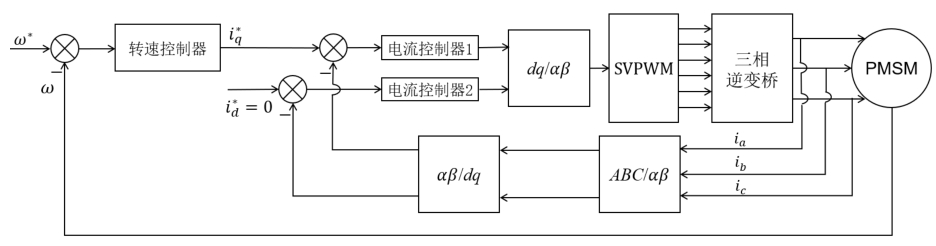
FOC 的核心想法是将定子三相电流通过坐标变换到定子同步旋转坐标系,分解为励磁电流和转矩电流。由于使用的是 PMSM,转子为永磁体,故使用了 $ i_d^* = 0 $ 的控制策略。经过坐标变换后,PMSM 的控制方式就和直流电机类似,励磁电流和转矩电流解耦分别进行控制。
SVPWM 则是一种发波方法,能提高母线电压的利用率,其本质也是一种三次谐波注入的方式,其更容易使用微控制器实现。
更细节的方法上的内容可以参考我的电机控制学习笔记。
2.功率部分设计
方法是这么个方法,从实现上来讲,MCU 需要的需要采集三相电流,转子位置,输出的 PWM 信号需要驱动功率模块。
一般的,低压部分和高压功率部分,低压部分实现纯逻辑的东西,高压功率部分即驱动板,完成信号的变换、隔离、功率输出。
此外实际的电机控制还需要考虑保护,比如过压、欠压、过流等功能。这些事情软件也可以做,但实际的电机控制一般都会用硬件实现以更快的实现保护,因此加了一个 FPGA ,在遇到硬件保护触发时,直接切断 PWM 输出,然后向微控制器发送错误代码。
STM32 的电机开发套件里给了更详细的图。
也可以看出电机控制这一块其实已经比较成熟了。
我要设计的是功率部分,先看实验室祖传的电机控制板的接口
- 通信接口
- CAN 通信接口 2 路
- RS485 通信接口 2 路
- 驱动部分接口
- PWM输出 6 路
- 相电流检测输入 2 路,(0-5V)
- 母线电压检测输入 1 路,(0-5V)
- 温度检测输入 1 路(0-5V)
- 转子位置传感器
- 旋转变压器 1 路
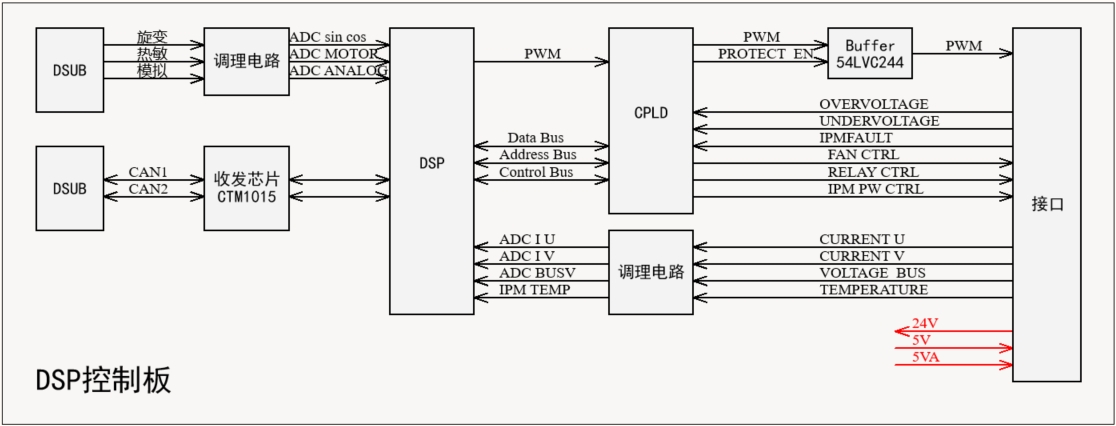
DSP 控制板内部原理,简单画了个图
功率部分的硬件设计
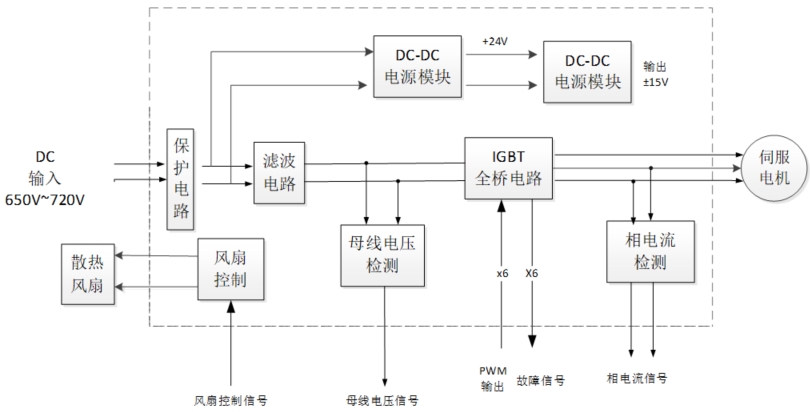
整个系统的电源输入为 700V,经过一个DCDC模块转换为24V 给低压部分供电。
一些关键元件的选型
- IGBT FF600R17ME4 ,配套驱动 2SP0115T2A0C
- 耐压 1600V,额定电流 600A,瞬时电流 1200A
- 电流传感器 HNC-500LT 霍尔电流传感器
- 母线电压检测 HNV025A
以及一些配套的电源模块,都选用了金升阳的。
小功率的电机驱动板会用 MOSFET ,电流传感器使用采样电阻,整个做成了一块板。这个大功率的每个元件都挺大,功率板和信号转接板的作用差不多。这里功率板的设计,我也画了个图
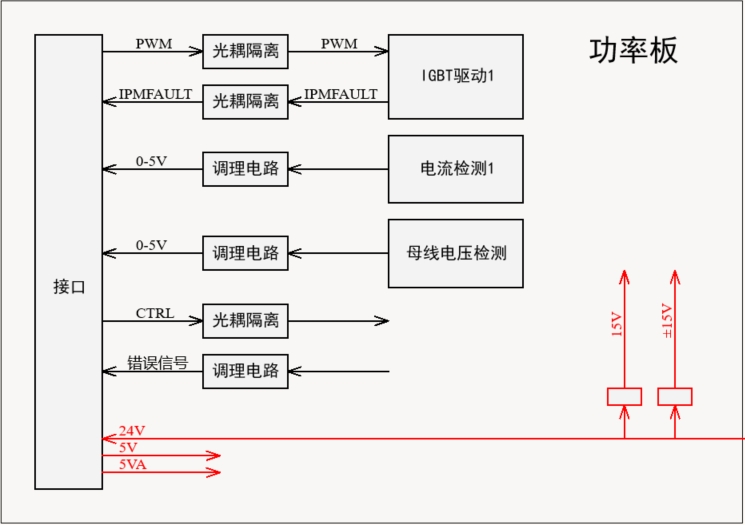
考虑到高压下调试时候一摊东西不是很安全,搞一个箱子装起来