双闭环系统弱磁调速
弱磁调速与调压调速
前面的调压方式为从额定转速向下调速,减小励磁电流是从额定转速向上调速。
调压调速时,励磁电流恒定,磁通不变,电磁转矩为\(T_e = C_T \varPhi I_d\),因此其最大电磁转矩也是不变的,称作"恒转矩调速方式",在弱磁调速范围内,转速越高,此通越弱,容许的转矩减小,是"恒功率调速"。
更多的,调压调速可以和弱磁调速配合起来,额定转速下,调压调速,额定转速上,弱磁调速,这样可以获得更大的调速范围。
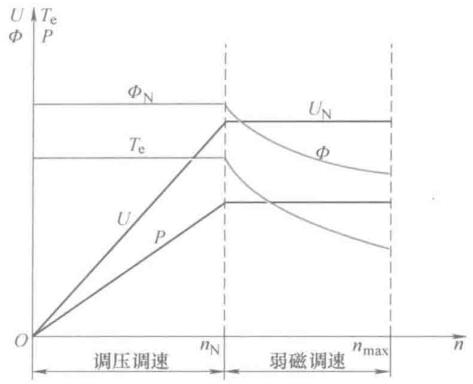
弱磁和调压配合的控制特性。在额定转速下,应该满磁调压,在额定转速上应该额定电压调节磁通。
这就新出现了控制磁通的问题,产生磁通的原因是励磁电流,因此需要控制励磁电流。
励磁电流控制
在额定转速上进行弱磁控制时,调压和调磁通的给定装置不应该是独立的,而是有关联的。
额定转速下,满磁通下调电压;额定转速上,额定电压调励磁。因此存在恒转矩的变压调速和恒功率的弱磁调速两个不同区段,需要找个方法控制系统在这两个区段切换。
下图就是一种方法的原理图
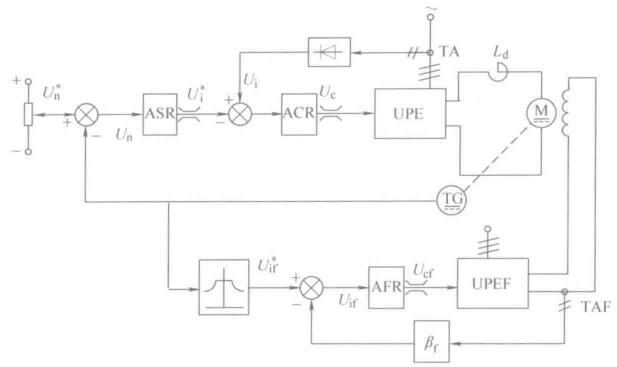
在转速较低时,磁通量给定恒定,系统就是一个普通的双闭环调速系统,当速度到了额定转速上时,励磁电流给定会变小,电动机工作在弱磁状态。
前面讨论的数学模型时恒定磁通下建立的,当磁通为变量时,\(C_e\)和\(C_m\)都不是常数了,使用\(K_e \varPhi\)和\(K_m \varPhi\)来表示,这时候,这两重要物理量
\[E = K_e \varPhi n\] \[T_e = K_m \varPhi I_d\]一些列参数都会跟着变化,除此之外,励磁电流和磁通之间也是饱和个非线性关系,因此弱磁控制过程的动态结构图为
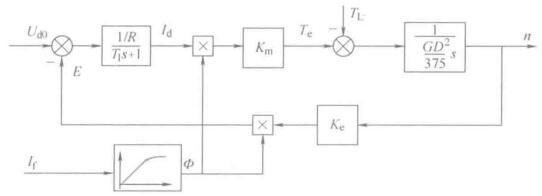
在磁通变化时,直流电动机是一个含有乘法器的非线性对象,如果ASR还是采用线性的PI调节器,无法保证在整个弱磁调速范围内都有良好性能。
实际上,这一部分内容并不是电机控制的重点。对于直流电机来说,选择额定转速更高的电机向下调速更简单容易。
但是这部分已经有异步电机的一些影子出现了,这里作为一个思想,后面异步电机里会遇到类似的情况,再见到不会显得太陌生。
