Link Connection
有了前面对于空间和位置的描述,这里解决对机械臂本身空间位置描述的问题。在此基础上才能有运动学分析,即空间位置的数学关系描述。
单个连杆的参数
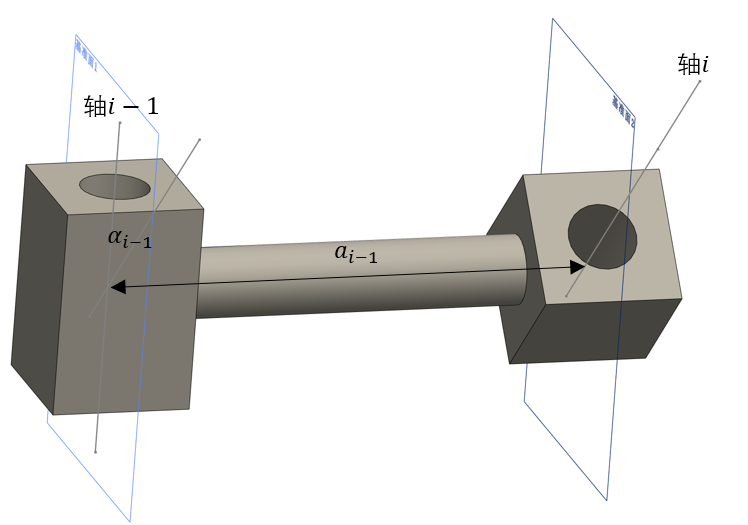
- \(\alpha_i\) link twist ,连杆扭转角,两个轴的夹角
- \(a_i\) link length,连杆长度。两个轴的距离
相邻连杆的位置关系参数
每个轴有个坐标系统,从第1轴到第2轴会经过一个转换。所有轴,末端到地的一个转换关系
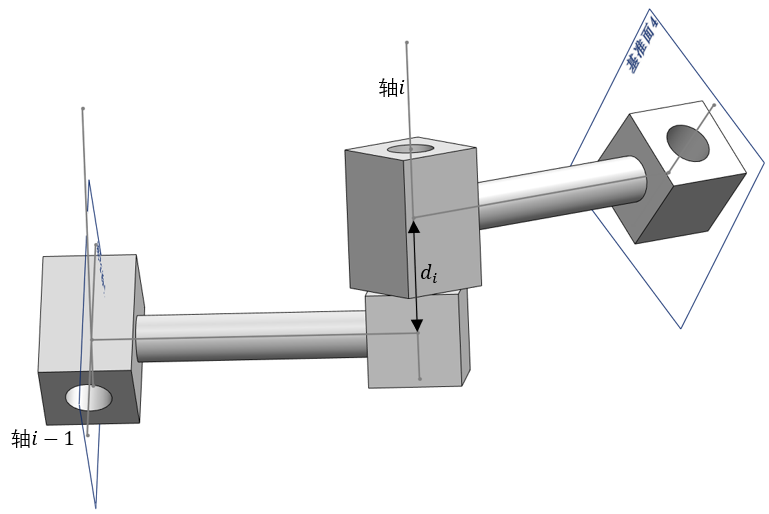
- \(d_i\) distance between 2 normals,两个 \(x\) 轴的距离,偏距
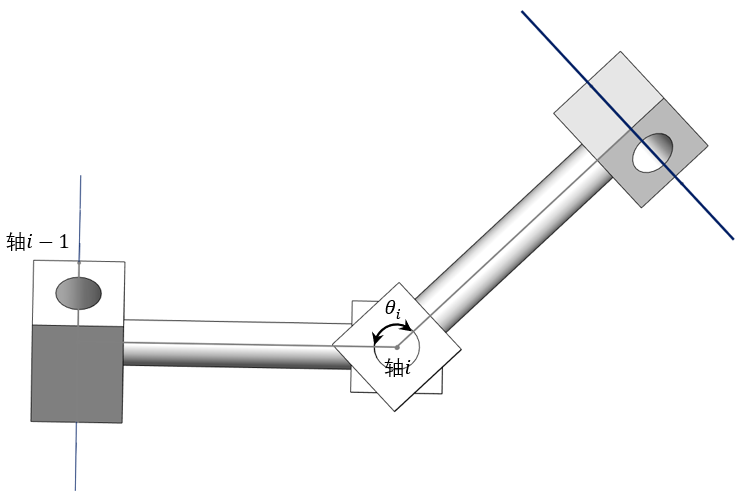
- \(\theta_i\) angle between 2 links ,关节转角,关节变量,其他的都是固定的。
D-H 方法
Denavit-Hartenberg 方法。
机械臂的每个连杆都可以用上面的 4 个参数来描述。这就是 D-H 方法。
为了描述相对位置关系,干需要在每个连杆上定义坐标系。
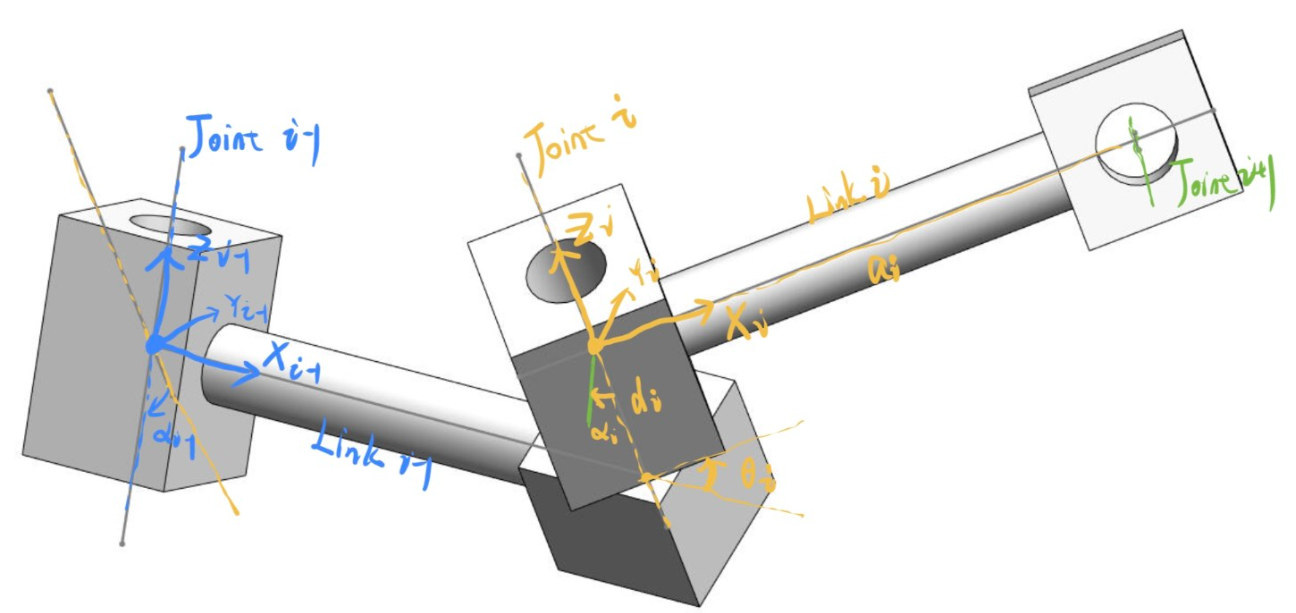
连杆坐标系定义
连杆上放坐标系有很多种放法,可以放在头上,也可以放在尾部。这是两种最常见的放法。
不论哪种放法,z和x轴的选取都是一样的:
- z 为旋转轴
- x 沿公垂线方向指向下一轴
y轴按照右手系来选。
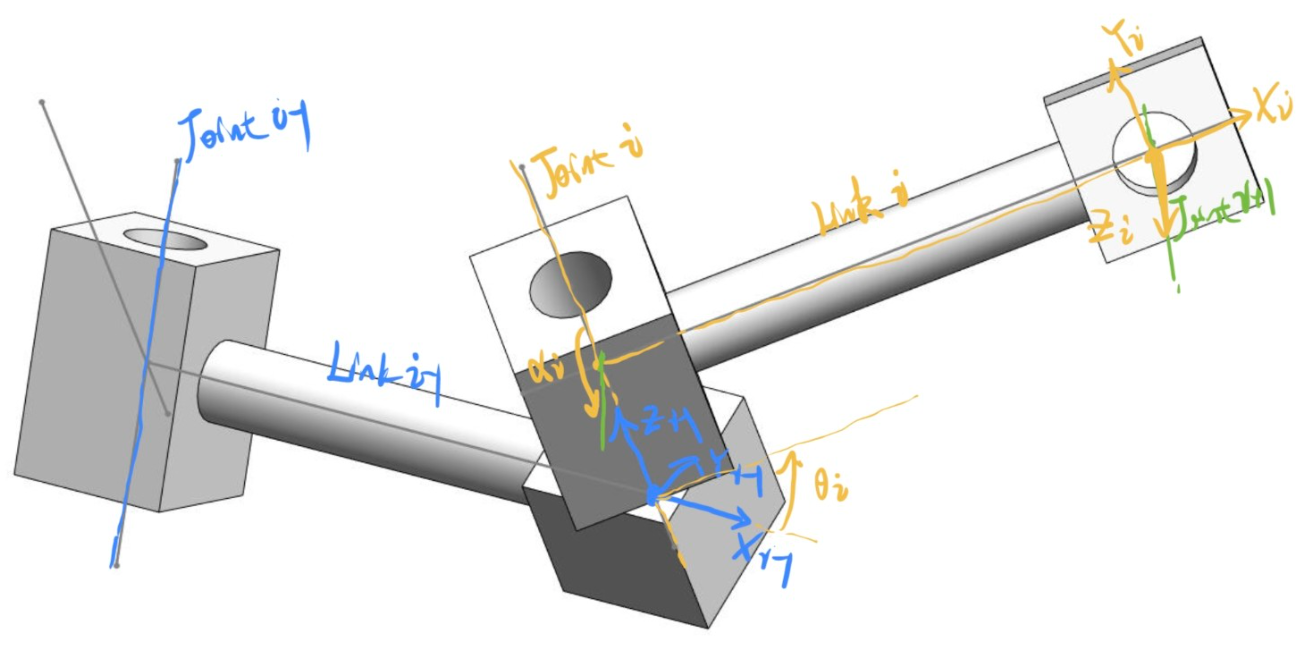
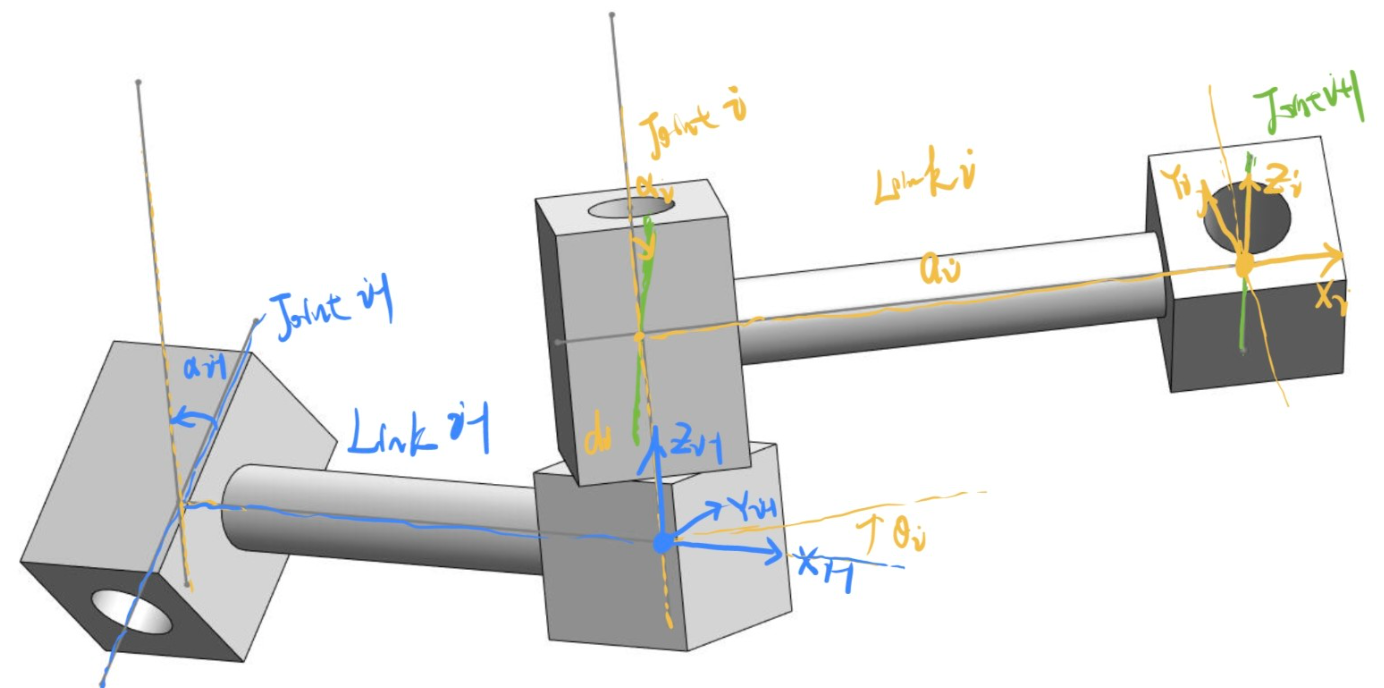
关节坐标系放在头部(靠近底座),《机器人学导论》里的坐标系是这种放法,坐标系 \(\{i\}\) 固连与连杆 \(i\) (link i),原点位于关节轴 \(i\)。
关节坐标系放在尾部(靠近末端工具),原点在关节轴 \(i+1\)
放在中间属于是吃力不讨好了。
关于坐标原点的选取:
- 当关节i轴线和关节i+1轴线相交时,取交点;
- 当关节i轴线和关节i+1轴线异面时,取两轴线的公垂线与关节i+1 轴线的交点;
- 当关节i轴线和关节i+1轴线平行时,取关节i+1轴线与关节i+2轴线 的公垂线与关节i+1轴线的交点;
不需要背,先看上面的图,找找感觉,然后再看文字描述。
DHmodel用了4个参数 \((a,d,\theta,\alpha)\),旋转和伸长缩短都是 z 方向。
因此从一个轴到下一个轴,4步就能完成。
下一节找出这个数学关系。
