结构与稳态、动态分析
系统结构
转速单闭环PI控制系统存在过流问题,前面提出了一种方案电流截止负反馈。但是转速但闭环无法按照要求充分控制电流,更理想的电流(转矩)控制方式:
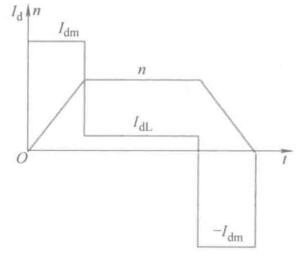
启动时,启动电流为允许的最大值,转速最快上升;到给定转速,电流下降,稳态转矩与负载转矩平衡;制动时,为反向最大允许电流。
理想是这样的,但是电感电流是不能突变的,尽管如此,我们还是要尽可能地往这个方向靠。
电流负反馈可以控制电流,启动时要控制电流,在达到稳态转速后要控制转速并且电流控制不要起阻碍作用。显然需要用两个控制器,这两个控制器使用串联的方式,这也就是常说的串级PID。
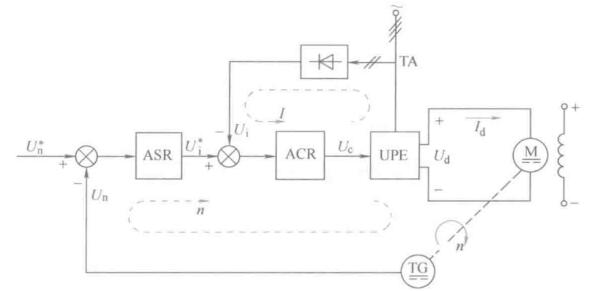
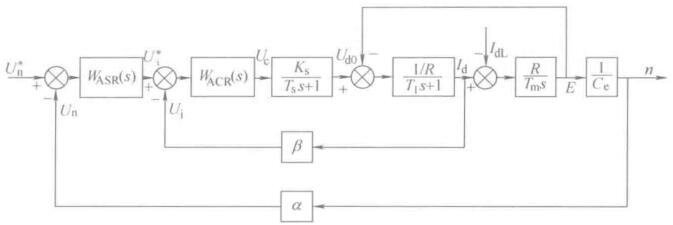
转速调节器ASR的输出作为电流调节器ACR的输入,用ACR去控制电力电子变换器。电流环为内环,转速转为外环,这两个控制器一般都用PI控制器。这两个控制器输出都是带限幅的。
上图这个\(U_i\)是电流负反馈,从变换器前面引出来的,和从电机引出来差了个系数。能量守恒,所以这里的电流也是可以反映电机电枢电流的。
稳态分析
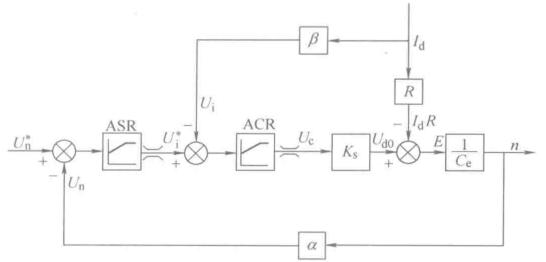
上面给出的是原理图,进行数量的分析的时候,就要转化成数学模型了,很容易可以给出稳态结构框图
稳态下扰动是负载电流,调节器饱和时,输出会做限幅处理,输入对输出就没影响了,需要反向输入使控制器退出饱和。
转速调节器不饱和时,两个调节器都不饱和,到达稳态时偏差为0,有
\[U_n^* = U_n = \alpha n = \alpha n^*\] \[U_i^* = U_i = \beta I_d = \beta I_{dL}\]也即稳态时,\(n = \frac{U_n^*}{\alpha} = n^*\),ASR输出小于限幅值,\(I_d\)也小于其限幅值\(I_{dm}\),\(I_{dm}\)肯定是大于负载电流的。因此其调节器不饱和时静特性就是下图AB段:
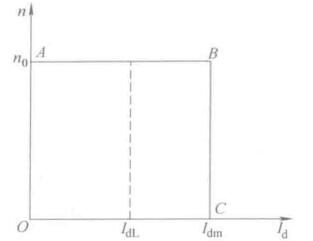
当ASR饱和,其输出到达限幅\(U_{im}^*\),实际上相当于外环开环,转速变化对转速控制已经没影响了。双闭环系统这时候就是个无静差的电流闭环控制系统。稳态时\(I_d = \frac{U_{im}^*}{\beta} = I_{dm}\)
因此,ASR的输出限幅值\(U_{im}^*\)取决于最大电流\(I_{dm}\),这个值是设计者选的,兼顾最大加速度和电动机允许的最大过载能力。
双闭环闭环系统的静态特性在负载电流小于\(I_{dm}\)时,是一个无静差的转速控制控制系统,当负载电流达到\(I_{dm}\)以后,ASR为饱和输出限幅值,ACR起作用,系统表现为电流无静差,起到了过流保护的作用。电动机以最大允许加速度进行加速减速,这就很接近理想的控制过程了。
稳态工作点参数的计算。都不饱和时,有
\[U_n^* = U_n = \alpha n = \alpha n^*\] \[U_i^* = U_i = \beta I_d = \beta I_{dL}\] \[U_c = \frac{U_{d0}}{K_s} = \frac{C_e n + I_d R}{K_s} = \frac{C_e U_n^* / \alpha + I_{dL}R}{K_s}\]可以看出在稳态工作点,转速\(n\)由给定电压\(U_n^*\)决定的,ASR的输出量\(U_i^*\)是由负载电流\(I_{dL}\)决定的,而ACR的输出量控制电压\(U_c\)的大小则同时取决于\(n\)和\(I_d\)(\(U_n^*\)和\(I_{dL}\))。
饱和后,应为最大控制电压\(U_{cm}\),该值作为ACR的最小输出限幅,同时也要考虑电力电子变换器的输出电压。
PI调节器和P调节器的输出不同体现:P调节器输出总是正比于输入;PI的饱和输出为限幅值,非饱和输出在动态过程取决于输入的积分,稳态后输入为0,输出的稳定值是由后面环节的需要决定的,后面需要PI调节器提供多大的输出值都能做到,直到饱和为止。
基于稳态工作点,可以很容易找到反馈参数\(\alpha\)和\(\beta\),给定的最大值也可以自己选。
动态数学模型
在前面单闭环的基础上,考虑双闭环控制系统的结构图,为了引出电枢电流,原来写成二阶系统的电动机得拆开来,最后结构图就是下面这样子
动态过程分析
启动分析

电机控制系统的被控对象是转速,其跟随性能可以用阶跃响应来描述。在恒定负载下,转速的变换是由转矩(电流)决定的,因此这两个状态量要放在一起对比研究。上图是一个带负载下启动的电流波形和转速波形。
I阶段,调节电流到最大允许值,在大于负载电流后,合转矩大于0,转速开始增加。\(t_1\)时刻达到最大允许电流值。ASR很快饱和,ACR不饱和。
II阶段,电流控制在最大允许值,合转矩恒定,转速稳定上升。这里有个小问题是电流并不是被PI控制器控制在\(I_{dm}\),是有误差的。ASR饱和,转速环相当于开环,\(U_{im}^*\)入,\(I_d\)出,有了PI控制器以后实际上是个I型系统,只能无静差跟随阶跃信号,但是要注意产生静差的原因是扰动反电势\(E = C_e n\),斜坡信号的"档次"比较高,I型系统无法无静差跟随。
III阶段为转速调节,因为ASR有积分饱和,所以转速还会上升一点需要退饱和。在电流大于负载电流前,转速还要上升的,合转矩和转速同向。电磁转矩和负载转矩平衡以后,转速稳定。如果参数调不好,这里会震荡。这个阶段ASR和ACR都不饱和,ASR主导调节,ACR力图使得\(I_d\)尽快跟随给定值\(U_i^*\)
可以看出双闭环电机控制的特点:
- 饱和非线性控制。随着ASR饱和与不饱和,系统处于两种状态,并不是线性的,不可以简单的用线性控制理论来分析启动过程,也无法用线性控制里来粗略设计,只能分段线性来分析。
- 转速有超调。ASR采用PI控制器时,必然有超调。如果不允许有超调,还得用其他办法。
- 准时间最优。在物理设备允许的条件下实现最短时间的控制。
制动分析
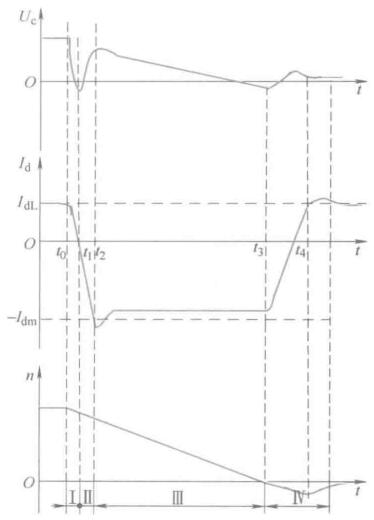
带负载运行时,突然收到停车指令。先衰减到0,然后反向增加到最大允许值,并且维持住,有静差的原因和前面一样,
动态抗扰性能分析
对于电机控制,重要的抗扰性能时靠负载扰动和电源电压波动扰动。
由控制框图,负载电流扰动影响在电流环之后,因此只能靠ASR来抵抗负载扰动,在设计ASR时,应该有比较好的抗扰性能指标,
对于电网电压扰动,与转速单闭环做个比较,这里重新画一下单闭环的结构框图做一个对比
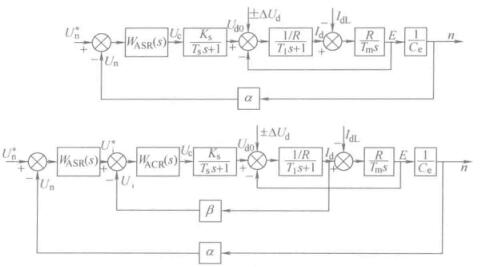
两个系统的反馈都包围了电源电压波动和负载扰动,从稳态来说效果一样的。但是动态性能不同,有了电流环,电压波动通过电流反馈可以及时得到调节,不需要等到电压波动影响转速后才反馈回来调节。
ASR、ACR作用
ASR
- 系统的主导调节器,使转速\(n\)跟随给定\(U_n^*\),如果使用PI控制器,可以无静差
- 对负载变化抗扰
- 输出限幅决定电机最大电流
ACR
- 内环,使电流紧紧跟随给定电压\(U_i^*\)
- 对电源电压波动起及时抗扰的作用
- 转速动态过程中,保证电动机为最大允许电流,使得加速度最大
- 电机过载或者堵转时,限制电枢电流最大值,起快速的自动保护作用。
